Flexible CAN system control
Get control of your Controller Area Network devices
Millions of machines and systems are networked via CAN (Controller Area Network) or CAN FD. Ixxat solutions from HMS enable you to connect PLCs and PC-based systems to your CAN network – reliably and cost-effectively.
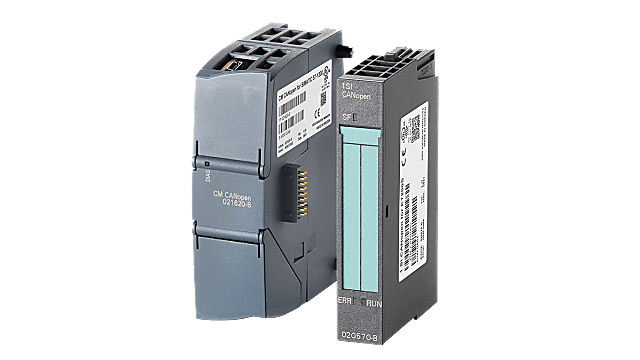
- Enable communication between Siemens SIMATIC PLCs and CAN and CANopen systems – Using established CAN-based components within a PROFINET/PROFIBUS environment.
- Connect PC-based control applications to CAN networks – supporting a wide range of operating systems and PC interfaces.